
0
Degrees of Freedom
0
Rotation (degrees)
0
Servo Motors
0
Co-axial Rotors
Full 6-DoF control with independent position and orientation
Paired servo motors enable arbitrary thrust vectoring in any direction
Robust control architecture maintains stability under external disturbances
Overactuated design provides resilience to component failures
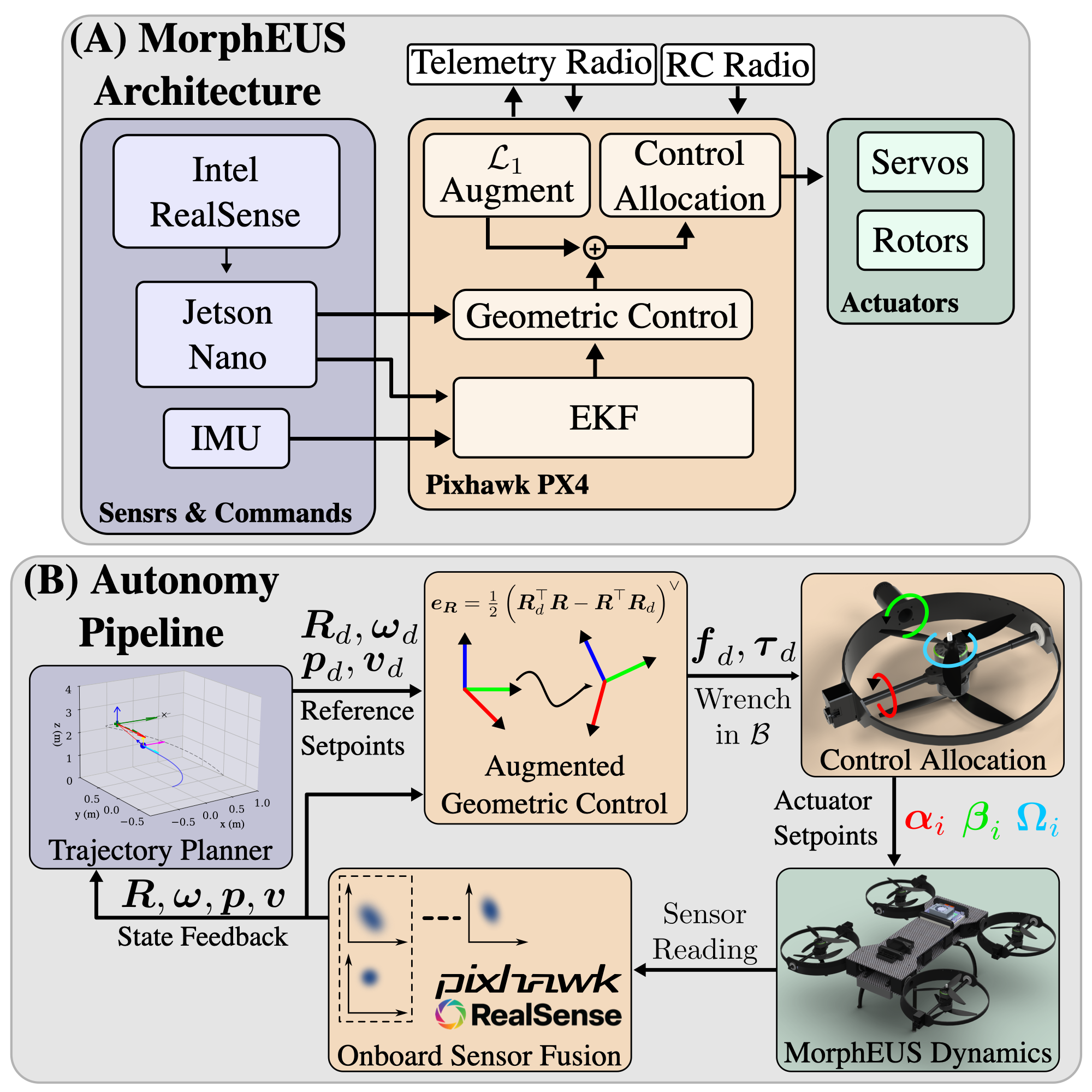
We present a novel variable-tilt co-axial quadrotor and a control pipeline that achieves a significantly higher level of maneuverability, dexterity, and efficiency. This system builds on prior work by improving omnidirectional flight capabilities while avoiding inefficient thrust cancellations. To realize this, each of the rotor pairs can be independently oriented using a pair of servo motors. This allows for full 6-DoF control of position and orientation. In the paper, we prove that the proposed controller is exponentially stable almost everywhere and energy-optimal in terms of control allocation.
@inproceedings{iral2025morpheus,
title = {MorphEUS: Morphable OmnidirEctional Unmanned System},
author = {Ivan Bao and Jos{\'e} C. D{\'\i}az Pe{\'o}n Gonz{\'a}lez Pacheco and Atharva Navsalkar and Andrew Scheffer and Sashreek Shankar and Andrew Zhao and Hongyu Zhou and Vasileios Tzoumas},
booktitle = {Proceedings of the ICRA 2025 OCRAIM Workshop},
year = {2025},
note = {To appear},
url = {https://iral-morphable.github.io/}
}